Unitree R1 Basic Humanoid Robot (R1 Basic)
")
In stock
- KAUBAMÄRK:
- UNITREE ROBOTICS
- MUDEL:
- R1 BASIC
- ORIGIN:
- Hiina
- Warranty:
- 8 MONTHS
- AVAILABILITY:
- USUALLY SHIPS IN 7-14 BUSINESS DAYS
- SKU:
- Unitree-Robotics-R1-Basic
Erinevalt teenindushumanoidi, mis on optimeeritud kodutööde või lao tööde jaoks, on R1 Basic peamiselt iseloomustatud kui ["arendajale suunatud platvorm"]: väike, suhteliselt kerge kahejalgne robot, mis on mõeldud laboratooriumidele, idufirmadele ja haridussektorile, kes soovivad humanoidset vormitegurit kõnnakute genereerimise, tasakaalu kontrollimise, kogu keha liikumise planeerimise ja inim-robot interaktsiooni testimiseks. Teatatud spetsifikatsioonid—näiteks mass umbes 25 kg ja 26 liigest—paigutage see humanoidide klassi, mis eelistab liikuvust ja taskukohasust üle raske kandevõime.
Disain ja omadused
Inimese kujund ja liikuvus
R1 Basic järgib klassikalist kahejalgsed humanoid paigutus (torso, kaks jalga ja ülemise keha struktuur), rõhutades dünaamilisi liikumisi. Varajane meedia kajastus tõi esile demonstreerimise järjestused, mis hõlmasid atleetlikke liikumisi (nt käärliikumised ja löögigeste), mis on tüüpilised näidised kaasaegsetele humanoididele, kuna need testivad tasakaalu, koordinatsiooni ja aktuaatorite reageerimisvõimet.
Kerge ehituse filosoofia
Avalikest kirjeldustest tulenevalt on R1 raamitud kui kerge platvorm võrreldes paljude täissuuruses humanoididega, mille eesmärk on tööstuslikud koormused. Kergem robot vähendab tavaliselt aktuaatorite pöördemomendi nõudeid, võib lihtsustada kukkumise juhtimist ja võib vähendada kogu süsteemi maksumust - tõstejõu ja koormuse all vastupidavuse arvelt.
Arendajale suunatud programmeeritavus
R1 katvuse kirjeldamisel räägitakse sellest sageli kui programmable ja jaotatud arendajatele - see tähendab, et platvorm on mõeldud kohandatud käitumise, liikumissekventside ja teadustöö töövoogude toetamiseks (näiteks tugevdamise õppimise poliitikad liikumise või tajutava navigeerimise jaoks).
Märkus: Spetsiifiline tarkvara virn, SDK üksikasjad ja toetatud vahekiht (nt ROS/ROS 2) võivad varieeruda toote põlvkonna ja konfiguratsiooni järgi; potentsiaalsed ostjad kinnitavad tavaliselt neid punkte ametlikus dokumentatsioonis või hinnapakkumistes.
Tehnoloogia ja spetsifikatsioonid
Mehaaniline struktuur ja vabadusastmed
Avalikustamine viitas R1 Basicule umbes 25 kg with 26 liigest, pakkudes välja mitme liigese arhitektuuri, mis suudab toetada kogu keha liikumist ja väljendusrikkaid liigutusi, mitte ainult minimaalset kahel jalal kõndimist.
In humanoid robots, “joints” generally refer to actuated degrees of freedom across hips, knees, ankles, torso/waist, shoulders, elbows, and sometimes wrists or hand mechanisms depending on variant.
Toimimise ja liikumise juhtimine (üldised omadused)
Kuna detailseid aktuaatorite spetsifikatsioone ei avaldata järjepidevalt samas kohas erinevates väljaannetes, toetuvad selle klassi humanoidid tavaliselt elektrilised aktuaatorid koosatud andurite (asendi/kiirus/keeramisvõime hindamine) ja suletud silmuse juhtimisega tasakaalu säilitamiseks. Peamised juhtimiskihid hõlmavad tavaliselt:
-
Riigi hindamine (IMU + ühine tajumine) keha orientatsiooni ja stabiilsuse tuvastamiseks
-
Kogu keha kontroll koordineerida jalgu ja ülakeha piirangute all
-
Gait genereerimine jalutamiseks, pööramiseks ja taastumismanööverdusteks
-
Languse tuvastamine ja taastumise käitumised kahjustuste piiramiseks ja kehahoiaku taastamiseks
Tajumine ja interaktsioon
Mõned raportid omistavad R1-le hääle- ja pildituvastus võimekus (tihti arutletakse laialdaselt kui “AI omadused”).
Praktikas võivad need võimed ulatuda pardal olevast tajumisest kuni köitmise või serva arvutustöövoogudeni, sõltuvalt ostetud arvutusmoodulist ja kaamera/sensori paketist.
Positsioneerimine Unitree humanoidide portfellis
Unitree laiem edasiminek humanoidide valdkonnas (koos teiste mudelitega, mida turustatakse teadusuuringute ja tööstuslike katsete jaoks) arutatakse sageli ettevõtte kasvu ja laieneva humanoidrobotite sektori kontekstis Hiinas.
See kontekst on oluline, kuna see mõjutab pikaajalist tuge: püsivara uuendused, varuosade kättesaadavus ja jätkuv ökosüsteemi arendamine on sageli seotud tootja strateegiliste prioriteetidega.
Rakendused ja kasutusjuhtumid
Robootika uurimistöö ja kehastatud tehisintellekt
R1 Basic'i kõige loomulikum sobivus on uurimistöö ja prototüüpimine, seal hulgas:
-
Bipedal liikumise tugevdamise õppimine (õppepoliitikad simuleerimises ja ülekandmine riistvarale)
-
Kogu keha liikumise planeerimine tasakaalu, astumise ja häirete tõrje
-
Imitatsioon õppimine gestuuri ja liikumise järjestused
-
Keha AI eksperimendid, kus tajumine mõjutab liikumisotsuseid
Haridus ja labori juhendamine
Ülikoolid ja tehnilised programmid saavad kasutada väiksemaid humanoide õpetamiseks:
-
Kontrolliteooria (PID/olekuru kontroll) rakendatud ebastabiilsetele süsteemidele
-
Robot kineetika ja dünaamika (mitme lingi modelleerimine)
-
Sensorite fusioon ja reaalajas süsteemid
-
Ohutusinseneriteadus ja operatiivsed protseduurid mobiilsete robotite jaoks
Demonstratsioonid, turundus ja interaktsiooniprototüübid
Humanoidid paigutatakse sageli kontrollitud keskkondadesse demode, ürituste ja varajaste inim-robotite interaktsiooni prototüüpide jaoks - eriti siis, kui eesmärk on hinnata public acceptance, interaktsioonimustrid, või kõne/nägemisliidesed pigem kui raske töö tulemus.
Eelised / Kasu
Madala hind humanoid arendusse sisenemiseks
R1 Basicuga seotud määrav eelis on ["hinna kättesaadavus"] seoses paljude humanoididega, mille hind on kümneid tuhandeid kuni sadu tuhandeid dollareid.
Madalam hinnapunkt võib laiendada vastuvõttu väiksemate meeskondade seas ja võimaldada mitme roboti flote uurimistööks, ilma et üks kallis platvorm muutuks kitsaskohaks.
Kerge platvorm ohutumaks iteratsiooniks
Kergem robot võib kukkumiste ajal vähendada kineetilist energiat ja lihtsustada käsitlemist, transporti ja laboratoorseid toiminguid—oluline meeskondadele, kes töötavad kiiresti liikumiskäitumiste kallal.
Sobiv liikumiskesksete katsetuste jaoks
Kuna varased narratiivid keskenduvad dünaamilistele demonstreerimisele, arutatakse R1 Basicut sageli platvormina, mille jaoks spordilaadsed liikumised, kõndimise töö, ja kogu keha kontrolli eksperimendid—valdkonnad, kus humanoidid võivad olla ainulaadselt väärtuslikud võrreldes ratastega robotitega.
```json [ "KKK jaotis" ] ```
Mis on Unitree R1 Basic humanoidrobot?
The Unitree R1 Basic on on programmable humanoid robot positsioneeritud kui madalama kuluga platvorm arendajatele, laboritele ja haridusele, teatas umbes 25 kg with 26 liigest ja ja pealkirja hind allpool US$6,000 2025. aasta katteala.
Kuidas töötab Unitree R1 Basic?
Nagu enamik humanoide, ühendab see elektrilised aktuaatorid, ühised andurid ja IMU koos reaalajas juhtimistarkvaraga tasakaalu säilitamiseks, kõndimisliikumiste genereerimiseks ja kogu keha liikumiste teostamiseks. Kõrgema taseme tarkvara võib lisada tajumise (kaamerapõhine) ja interaktsiooni funktsioone sõltuvalt konfiguratsioonist ja arvutusvirnast.
Miks on Unitree R1 Basic oluline?
See on peamiselt tähelepanuväärne selle poolest, et madala sisenemise maksumus in inimlik robotite katsetamisse, võimaldades rohkematel meeskondadel testida liikumise kontrolli, kehastatud tehisintellekti ja inim-robot interaktsiooni ilma, et oleks vaja toetuda palju kallimale inimlikule platvormile.
Mis on Unitree R1 Basic'i eelised?
Peamised eelised hõlmavad taskukohasus, a humanoidi vormifaktor uurimistöö ja suhtlemise jaoks, ja a kerge platvorm sobiv iteratiivseks arendamiseks ja liikumise juhtimise katsetamiseks.
Kokkuvõte
The Unitree R1 Basic Inimene Robot on laialdaselt arutletud kui ligipääsetav, arendajatele suunatud humanoidne platvorm, mis prioriseerib madal hindadega ja liikumise keskne katsetamine. Avaldatud pealkirja spetsifikatsioonidega (umbes 25 kg ja 26 liigest) ja hinnakujundus lähedal 39,999 jüaani, R1 Basic peegeldab laiemat suundumust teha inimese sarnased robotid ja kehastatud tehisintellekt rohkem saavutatav uurimislaboritele, ülikoolidele ja idufirmadele—samal ajal kui see nõuab endiselt hoolikat konfiguratsiooni detailide, tarkvara toe ja piirkondade kättesaadavuse hindamist.
Kõrgus, Laius ja Paksus (jalust): 1210x357x190mm
Kaal koos akuga: Umbes 25kg
Vabadusaste (Kokku liigeseid): 24
Jala vabadused jala kohta: 6
Vabadusastmed vöökoha jaoks: 2
Vabadusastmed käe kohta: 5
Vabadusastmed inimese kohta: Puuduvad
Maksimaalne ühe käe kandevõime: 2kg
Vasika + Reie Pikkus: 0.675m
ühe käe pikkus: umbes 0.435m
Äärmuslik liigeste liikumise ulatus:
Vöökoht: Y ±150°, R ±30°
["Põlv: -10° kuni +148°"]
Hip: Y ±157°, P -168° kuni +146°, R -60° kuni +100°
Hollow Joints with Internal Cable Routing: Jah
Joint Encoders: Dual + Single
Jahutus süsteem: Lokaliseeritud õhu jahutus
Toiteallikas: Liitiumaku
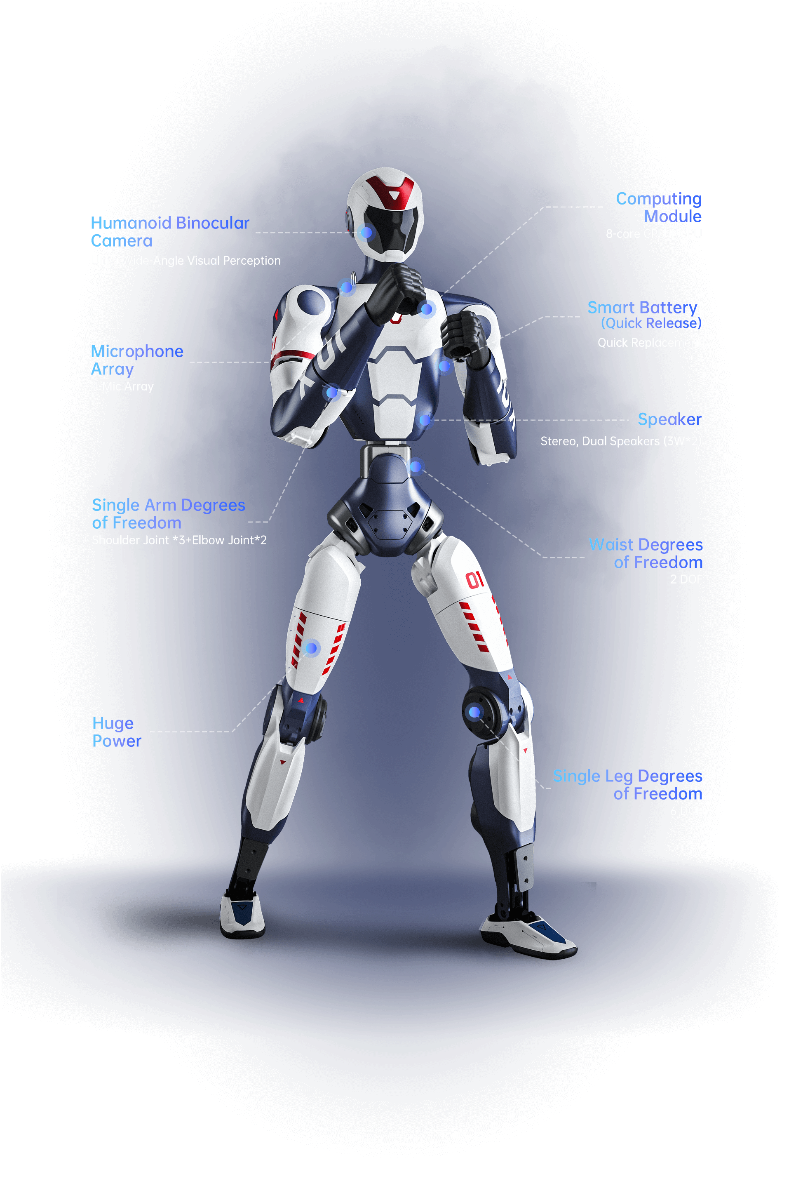
["Põhikompuutri Võimsus: 8- tuumaline Kõrge Jõudlusega CPU"]
Kõlarite ja mikrofonide rühma standard
Wi-Fi 6, Bluetooth 5.2: Jah
Perception Sensor: Inimese Binokkelkaamera
Charger (1), Nutikas Aku (Kiire Vabastamine) (1)
Käeshoitav kaugjuhtimispult (1)
Aku aeg: Umbes 1 tund
Smart OTA Upgrade: Toetatud
```json
["Teise arendamine: Ei"]
```
Garantii: 8 kuud
Robot Aksessuaarid:
1. Kaugjuhtimispult
2. Aku laadija
3. Roboti transportkott
Kaitseklamber ei kuulu vaikimisi komplekti