Unitree R1 Basic Humanoid Robot (R1 Basic)
")
In stock
- MERKKI:
- UNITREE ROBOTICS
- MALLI:
- R1 BASIC
- ORIGIN:
- Kiina
- Warranty:
- 8 MONTHS
- AVAILABILITY:
- USUALLY SHIPS IN 7-14 BUSINESS DAYS
- SKU:
- Unitree-Robotics-R1-Basic
Toisin kuin palveluhumanoidit, jotka on optimoitu kotitaloustöihin tai varastotyöhön, R1 Basicia on luonnehdittu ensisijaisesti sellaisena kehittäjäystävällinen alusta: pieni, suhteellisen kevyt kaksijalkainen, joka on tarkoitettu laboratorioihin, startup-yrityksiin ja koulutustilanteisiin, jotka haluavat humanoidimuotoisen rakenteen askelluksen tuottamisen, tasapainon hallinnan, koko kehon liikkeen suunnittelun ja ihmisen ja robotin vuorovaikutuksen testaamiseen. Ilmoitetut tekniset tiedot—kuten massa noin 25 kg ja 26 nivelä—aseta se humanoidien luokkaan, jotka priorisoivat ketteryyttä ja edullisuutta raskaan kuormakapasiteetin sijaan.
Suunnittelu ja ominaisuudet
Ihmismäisen muodon tekijä ja liikkuvuus
R1 Basic seuraa klassista kaksijalkainen humanoidi asettelu (torso, kaksi jalkaa ja ylävartalon rakenne), korostaen dynaamisia liikkeitä. Varhaiset mediakattavuudet korostivat esittelyjaksoja, jotka sisälsivät urheilullisia liikkeitä (esim. kärrynpyörämäisiä liikkeitä ja iskevää elehdintää), jotka ovat tyypillisiä esityksiä moderneille humanoideille, koska ne testauttavat tasapainoa, koordinaatiota ja toimilaitteiden reagointikykyä.
Kevyt rakennusfilosofia
Julkisissa kuvauksissa R1:stä käytetään kehystä, joka on kevyt alusta verrattuna moniin täysikokoisiin humanoideihin, jotka tähtäävät teollisiin kuormiin. Keveämpi robotti vähentää yleensä toimilaitteiden vääntömomenttivaatimuksia, voi yksinkertaistaa kaatumisen hallintaa ja voi alentaa koko järjestelmän kustannuksia - nostovoiman ja kuorman alla kestävyyden kustannuksella.
Kehittäjille suunnattu ohjelmoitavuus
R1:n kattavuutta kuvataan usein seuraavasti ohjelmoitava ja kohdistettu kehittäjille—mikä tarkoittaa, että alustan on tarkoitus tukea mukautettuja käyttäytymisiä, liikeseqvenssejä ja tutkimustyönkulkuja (esimerkiksi vahvistusoppimispolitiikkoja liikkumiseen tai havaintopohjaiseen navigointiin).
Huomio: Tietty ohjelmistopino, SDK-tiedot ja tuetut välikerrokset (esim. ROS/ROS 2) voivat vaihdella tuotteen sukupolven ja kokoonpanon mukaan; potentiaaliset ostajat vahvistavat tyypillisesti nämä asiat virallisessa dokumentaatiossa tai tarjouksissa.
Teknologia ja eritelmät
Mekaaninen rakenne ja vapausasteet
Julkinen raportointi mainitsi R1 Basicin noin 25 kg with 26 nivelä, ehdottaen moninivelliitä, joka voi tukea koko kehon liikettä ja ilmeikästä liikettä sen sijaan, että se rajoittuisi vain minimaaliseen kaksijalkaiseen kävelyyn.
In humanoid robots, “joints” generally refer to actuated degrees of freedom across hips, knees, ankles, torso/waist, shoulders, elbows, and sometimes wrists or hand mechanisms depending on variant.
Toiminta ja liikkeen ohjaus (yleiset ominaisuudet)
Vaikka yksityiskohtaisia toimilaitteiden teknisiä tietoja ei julkaista johdonmukaisesti samassa paikassa eri lähteissä, tämän luokan humanoidit luottavat tyypillisesti sähkökäyttöiset toimilaitteet integroidulla aistimisella (asento/nopeus/vääntöarviointi) ja suljetulla ohjauksella tasapainon ylläpitämiseksi. Ydinohjauskerrokset sisältävät yleensä:
-
Valtion arviointi (IMU + yhteinen aistiminen) kehon suuntautumisen ja vakauden päättelemiseksi
-
Koko kehon hallinta koordinoida jalkoja ja ylävartaloa rajoitusten alla
-
Gait generation kävelyyn, kääntämiseen ja palautumistoimiin
-
Syksyn havaitsemisen ja palautumiskäyttäytymisen vahingoittamisen rajoittamiseksi ja asennon palauttamiseksi
Havainto ja vuorovaikutus
Jotkut raportit liittävät R1:een äänentunnistus ja kuvantunnistus ["kyvykkyydet (usein keskustellaan laajasti \"AI-ominaisuuksista\")."]
Käytännössä nämä ominaisuudet voivat vaihdella laitteiston havaitsemisesta kiinteisiin tai reunalaskentatyönkulkuun riippuen ostettavan laskentamoduulin ja kameran/anturin paketista.
Unitree'n humanoid-portfolion sijoittaminen
Unitree’n laajempi siirtyminen humanoideihin (yhdessä muiden tutkimus- ja teollisuuskokeisiin markkinoitujen mallien kanssa) on usein keskustelunaiheena yrityksen kasvun ja laajenevan humanoidirobotiikan sektorin yhteydessä Kiinassa.
Tämä konteksti on tärkeä, koska se vaikuttaa pitkäaikaiseen tukeen: laiteohjelmistopäivitykset, varaosien saatavuus ja jatkuva ekosysteemin kehitys ovat usein sidoksissa valmistajan strategisiin prioriteetteihin.
Sovellukset ja käyttötapaukset
Robotiikan tutkimus ja ruumiillistettu tekoäly
R1 Basicin luonnollisin sovitus on tutkimus ja prototyyppaus, mukaan lukien:
-
Vahvistusoppiminen kaksijalkaiseen liikuntaan (koulutuspolitiikat simulaatiossa ja siirtäminen laitteistoon)
-
Koko kehon liikkeen suunnittelu tasapainon, askelluksen ja häiriön torjunnan vuoksi
-
Imitaatiokoulutus gesttien ja liikesarjojen varten
-
Ruumiillistettu tekoäly kokeet, joissa havainto ohjaa liiket päätöksiä
Koulutus ja laboratoriokoulutus
Yliopistot ja tekniset ohjelmat voivat käyttää pienempiä humanoideja opettamiseen:
-
Ohjausteoria (PID/tilatilaohjaus) epävakaiden järjestelmien soveltamisessa
-
Robotin kinematiikka ja dynamiikka (monilinkkimallinnus)
-
Sensori fuusio ja reaaliaikajärjestelmät
-
Turvallisuustekniikka ja toimintamenettelyt mobiiliroboteille
Demonstrations, marketing, and interaction prototypes ---
Humanoidit otetaan usein käyttöön hallituissa ympäristöissä esittelyissä, tapahtumissa ja varhaisvaiheen ihmisen ja robotin vuorovaikutusprototyypeissä—erityisesti kun tavoitteena on arvioida julkinen hyväksyntä, vuorovaikutusmallit, tai puhe/näköliittymät pikemminkin raskaan työpanoksen.
Edut / Hyödyt
Alhaisemmat kustannukset humanoidikehitykseen
R1 Basicin määrittävä etu on hinta saavutettavuus moniin humanoideihin verrattuna, joiden hinta vaihtelee kymmenistä tuhansista satoihin tuhansiin dollareihin.
Alhaisempi hintapiste voi laajentaa käyttöönottoa pienempien tiimien keskuudessa ja mahdollistaa monirobottifleetit tutkimusta varten ilman, että yksi kallis alusta muodostaa pullonkaulan.
Kevyt alusta turvallisempaan iterointiin
Keveämpi robotti voi vähentää kineettistä energiaa putoamisissa ja voi yksinkertaistaa käsittelyä, kuljetusta ja laboratoriotoimintoja—tärkeää tiimeille, jotka kehittävät nopeasti liikekäyttäytymistä.
Sopii liikekeskeiseen kokeiluun
Koska varhaiset kertomukset keskittyvät dynaamisiin esityksiin, R1 Basicia käsitellään yleisesti alustana, johon liittyy ["urheilumaiset liikkeet"], kävelytyö, ja koko kehon hallintakokeet—alueet, joissa humanoidit voivat olla ainutlaatuisen arvokkaita verrattuna pyörärobotteihin.
```json [ "UKK-osio" ] ```
Mikä on Unitree R1 Basic Humanoid Robot?
The Unitree R1 Perus on programmable humanoid robot "asettunut kehittäjille, laboratorioille ja koulutukselle alhaisemman kustannuksen alustaksi, raportoi noin" 25 kg with 26 nivelä ja otsikkohinta alle US$6,000 2025 kattavuus.
Miten Unitree R1 Basic toimii?
Kuten useimmat humanoidit, se yhdistää sähkökäyttöiset toimilaitteet, yhteiset anturit ja IMU reaaliaikaisella ohjausohjelmistolla tasapainon ylläpitämiseksi, kävelyliikkeiden tuottamiseksi ja koko kehon liikkeiden toteuttamiseksi. Korkeamman tason ohjelmisto voi lisätä havaintoa (kamera-pohjainen) ja vuorovaikutusominaisuuksia riippuen kokoonpanosta ja laskentakästackista.
Miksi Unitree R1 Basic on tärkeä?
Se on huomionarvoinen pääasiassa seuraavista syistä ["kustannusten alentaminen"] humanoid-robotiikan kokeiluun, mikä mahdollistaa useampien tiimien testata liikuntakontrollia, ruumiillistettua tekoälyä ja ihmisen ja robotin vuorovaikutusta ilman, että tarvitaan huomattavasti kalliimpia humanoidialustoja.
Mitä etuja Unitree R1 Basicilla on?
Keskeiset edut sisältävät "kohtuuhinta", a humanoid-muototekijä tutkimus- ja vuorovaikutustyöhön, ja a kevyt alusta sopiva iteratiiviseen kehitykseen ja liikkeenohjauskokeiluihin.
Yhteenveto
The Unitree R1 Perus Humanoidirobotti on laajalti keskusteltu saavutettavana, kehittäjälähtöisenä humanoidialustana, joka priorisoi alhaiset kustannukset ja liikkeeseen keskittyvä kokeilu. Julkisesti raportoiduilla pääominaisuuksilla (noin 25 kg ja 26 nivelä) ja hinnoittelu lähellä ["39,999 yuan"], R1 Basic heijastaa laajempaa suuntausta, joka liittyy humanoidirobotit ja ruumiillinen tekoäly enemmän saavutettavissa tutkimuslaboratorioille, yliopistoille ja startup-yrityksille—vaikka se edelleen vaatii huolellista arviointia kokoonpanotiedoista, ohjelmistotuesta ja saatavuudesta alueittain.
Korkeus, Leveys ja Paksuus (jalusta): 1210x357x190mm
Paino akun kanssa: Noin 25kg
[
"Vapausasteet (Yhteensä nivelten määrä): 24"
]
Vapausasteet per jalka: 6
Vapausasteet vyötärölle: 2
Vapauksien asteet per käsi: 5
Vapausasteet per henkilö: Ei mitään
["Maksimi yksittäisen käsivarren kantavuus: 2kg"]
Vasikka + Reiden Pituus: 0.675m
["yksittäinen käsivarren pituus: noin 0,435 m"]
Äärimmäinen nivelten liikelaajuus:
["Vyötärö: Y ±150°, R ±30°"]
Polvi: -10° to +148°
Hip: Y ±157°, P -168° to +146°, R -60° to +100°
Hollow Joints with Internal Cable Routing: Kyllä
Yhteiset enkooderit: Kaksois + Yksittäinen
Jäähdytysjärjestelmä: Paikallinen ilmankylmäys
Power Supply: Litiumakku
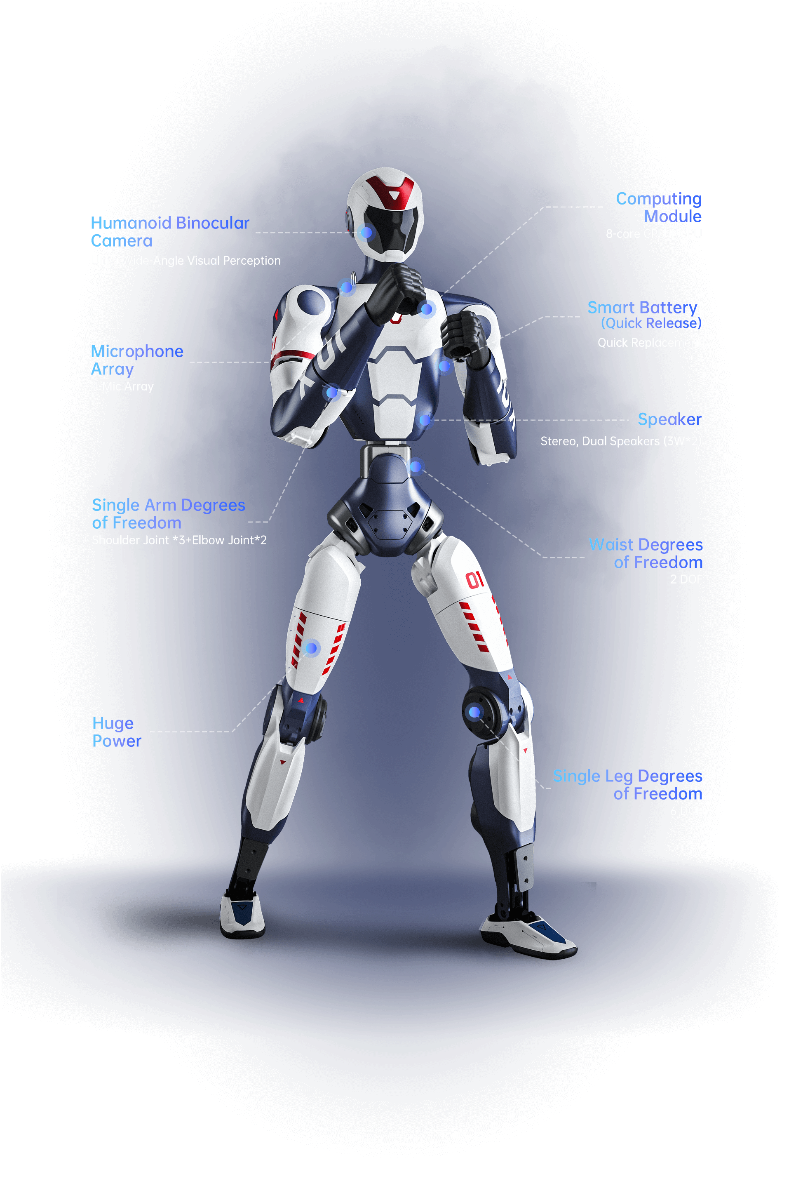
Peruslaskentateho: 8-ytiminen korkean suorituskyvyn CPU
Kaiutin- ja mikrofoniryhmän standardi
Wi-Fi 6, Bluetooth 5.2: Kyllä
Perception Sensor: Humanoid Binocular Camera
Charger (1), Älykäs akku (nopeasti irrotettava) (1)
Käsi-ohjain (1)
Akkukesto: Noin 1 tunti
Älykäs OTA-päivitys: Tuettu
```json
["Toissijainen kehitys: Ei"]
```
Takuu: 8 kuukautta
Robot Lisävarusteet:
1. Kauko-ohjain
2. Akkulaturi
3. Robottikuljetuslaatikko
Suojaava tuki ei sisälly oletuksena