Unitree R1 Basic Humanoid Robot (R1 Basic)
")
Auf Lager
- MARKE:
- UNITREE ROBOTICS
- MODELL:
- R1 BASIC
- ORIGIN:
- China
- Warranty:
- 8 MONTHS
- AVAILABILITY:
- USUALLY SHIPS IN 7-14 BUSINESS DAYS
- SKU:
- Unitree-Robotics-R1-Basic
Im Gegensatz zu Servicerobotern, die für Haushaltsarbeiten oder Lagerarbeiten optimiert sind, wurde der R1 Basic hauptsächlich als entwicklerorientierte Plattformcharakterisiert: ein kleiner, vergleichsweise leichter Zweibeiner, der für Labore, Startups und Bildungseinrichtungen gedacht ist, die eine humanoide Formfaktor für Tests zur Gangartgenerierung, Gleichgewichtskontrolle, ganzkörperliche Bewegungsplanung und Mensch-Roboter-Interaktion wünschen. Die berichteten Spezifikationen – wie eine Masse von etwa 25 kg und 26 Gelenken– platzieren ihn in einer Klasse von Humanoiden, die Agilität und Erschwinglichkeit über eine hohe Tragfähigkeit priorisieren.
Design und Merkmale
Humanoide Formfaktor und Mobilität
Der R1 Basic folgt einem klassischen zweibeinigen humanoiden Layout (Torso, zwei Beine und Oberkörperstruktur) und betont dynamische Bewegungen. Frühe Medienberichterstattung hob Demonstrationssequenzen hervor, die athletische Bewegungen (z. B. Radschläge und Schlaggesten) beinhalteten, die typische Schaufenster für moderne Humanoide sind, da sie Gleichgewicht, Koordination und Reaktionsfähigkeit der Aktuatoren auf die Probe stellen.
Leichte Bauweise
In öffentlichen Beschreibungen wird der R1 als leichte Plattform im Vergleich zu vielen vollwertigen Humanoiden dargestellt, die auf industrielle Traglasten abzielen. Ein leichterer Roboter reduziert im Allgemeinen die Anforderungen an das Aktuatormoment, kann das Fallmanagement vereinfachen und die Gesamtkosten des Systems senken – auf Kosten von Hebekraft und Ausdauer unter Last.
Entwicklerorientierte Programmierbarkeit
Die Berichterstattung über den R1 beschreibt ihn häufig als programmierbar und auf Entwickler ausgerichtet – was bedeutet, dass die Plattform dazu gedacht ist, benutzerdefinierte Verhaltensweisen, Bewegungssequenzen und Forschungsabläufe zu unterstützen (zum Beispiel Verstärkungslernrichtlinien für Fortbewegung oder wahrnehmungsgetriebene Navigation).
Hinweis: Der spezifische Software-Stack, SDK-Details und unterstützte Middleware (z. B. ROS/ROS 2) können je nach Produktgeneration und Konfiguration variieren; potenzielle Käufer bestätigen diese Punkte typischerweise in offiziellen Dokumenten oder Angeboten.
Technologie und Spezifikationen
Mechanische Struktur und Freiheitsgrade
Öffentliche Berichterstattung nannte den R1 Basic mit ungefähr 25 kg und 26 Gelenken, was auf eine Mehrgelenkarchitektur hindeutet, die ganzkörperliche Bewegungen und ausdrucksstarke Bewegungen unterstützen kann, anstatt nur minimale zweibeinige Gehbewegungen.
Bei humanoiden Robotern beziehen sich „Gelenke“ im Allgemeinen auf die aktuierten Freiheitsgrade in Hüften, Knien, Knöcheln, Torso/Taille, Schultern, Ellenbogen und manchmal Handgelenken oder Handmechanismen, je nach Variante.
Aktuation und Bewegungssteuerung (allgemeine Merkmale)
Während detaillierte Aktuatorenspezifikationen nicht konsistent an derselben Stelle über verschiedene Medien veröffentlicht werden, verlassen sich Humanoide dieser Klasse typischerweise auf elektrische Aktuatoren mit integrierter Sensorik (Positions-/Geschwindigkeits-/Drehmomentabschätzung) und geschlossener Regelung zur Aufrechterhaltung des Gleichgewichts. Die Kernsteuerungsschichten umfassen normalerweise:
-
Zustandsabschätzung (IMU + Gelenksensorik), um die Körperorientierung und Stabilität abzuleiten
-
Ganzkörperkontrolle , um Beine und Oberkörper unter Einschränkungen zu koordinieren
-
Gangartgenerierung für Gehen, Drehen und Erholungsmanöver
-
Sturzerkennung und Verhaltensweisen zur Wiederherstellung , um Schäden zu begrenzen und die Haltung zurückzusetzen
Wahrnehmung und Interaktion
Einige Berichte schreiben dem R1 Sprach- und Bilderkennung Fähigkeiten zu (oft allgemein als „KI-Funktionen“ diskutiert).
In der Praxis können diese Fähigkeiten von Onboard-Wahrnehmung bis hin zu angebundenen oder Edge-Computing-Workflows reichen, abhängig vom enthaltenen Rechenmodul und Kamera-/Sensorpaket bei einem bestimmten Kauf.
Positionierung innerhalb von Unitrees humanoidem Portfolio
Unitrees breiterer Vorstoß in die Humanoide (neben anderen Modellen, die für Forschungs- und industrielle Versuche vermarktet werden) wird häufig im Kontext des Wachstums des Unternehmens und des sich ausweitenden Sektors der humanoiden Robotik in China diskutiert.
Dieser Kontext ist wichtig, da er die langfristige Unterstützung beeinflusst: Firmware-Updates, Verfügbarkeit von Ersatzteilen und die fortlaufende Entwicklung des Ökosystems sind oft an die strategischen Prioritäten des Herstellers gebunden.
Anwendungen und Anwendungsfälle
Robotikforschung und verkörperte KI
Die natürlichste Passform des R1 Basic ist Forschung und Prototyping, einschließlich:
-
Verstärkungslernen für zweibeinige Fortbewegung (Trainingsrichtlinien in Simulation und Übertragung auf Hardware)
-
Ganzkörperbewegungsplanung für Gleichgewicht, Schritte und Störungsabweisung
-
Imitationslernen für Gesten- und Bewegungssequenzen
-
Verkörperte KI Experimente, bei denen Wahrnehmung Bewegungsentscheidungen informiert
Bildung und Laboranweisungen
Universitäten und technische Programme können kleinere Humanoide verwenden, um zu lehren:
-
Regelungstheorie (PID/Zustandsraumregelung), die auf instabile Systeme angewendet wird
-
Robotikkinematik und -dynamik (Mehrgelenkmodellierung)
-
Sensorfusion und Echtzeitsysteme
-
Sicherheitsengineering und Betriebsverfahren für mobile Roboter
Demonstrationen, Marketing und Interaktionsprototypen
Humanoide werden häufig in kontrollierten Umgebungen für Demos, Veranstaltungen und frühe Mensch-Roboter-Interaktionsprototypen eingesetzt – insbesondere wenn das Ziel darin besteht, öffentliche Akzeptanz, Interaktionsmusteroder Sprach-/Bildschnittstellen zu bewerten, anstatt eine hohe Arbeitsleistung zu erzielen.
Vorteile / Nutzen
Geringere Kosten für den Einstieg in die humanoide Entwicklung
Der entscheidende Vorteil des R1 Basic ist Preiszugänglichkeit im Vergleich zu vielen Humanoiden, die mit Zehntausenden bis Hunderttausenden von Dollar angegeben werden.
Ein niedrigerer Preis kann die Akzeptanz unter kleineren Teams erweitern und Mehrrobotersysteme für die Forschung ermöglichen, ohne dass eine einzige teure Plattform zum Engpass wird.
Leichte Plattform für sicherere Iterationen
Ein leichterer Roboter kann die kinetische Energie bei Stürzen reduzieren und kann Handhabung, Transport und Laboroperationen vereinfachen – wichtig für Teams, die schnell an Bewegungsverhalten iterieren.
Geeignet für bewegungszentrierte Experimente
Da frühe Narrative sich auf dynamische Demonstrationen konzentrieren, wird der R1 Basic häufig als Plattform für sportähnliche Bewegungen, Gangarbeit und Experimente zur ganzkörperlichen Kontrolle diskutiert – Bereiche, in denen Humanoide im Vergleich zu radbetriebenen Robotern einzigartig wertvoll sein können.
FAQ-Bereich
Was ist der Unitree R1 Basic Humanoid-Roboter?
Der Unitree R1 Basic ist ein programmierbarer humanoider Roboter , der als kostengünstigere Plattform für Entwickler, Labore und Bildung positioniert ist, mit einem Preis von etwa 25 kg und 26 Gelenken und einem Hauptpreis von unter 6.000 US-Dollar in der Berichterstattung von 2025.
Wie funktioniert der Unitree R1 Basic?
Wie die meisten Humanoiden kombiniert er elektrische Aktuatoren, Gelenksensoren und eine IMU mit Echtzeit-Software zur Steuerung, um das Gleichgewicht aufrechtzuerhalten, Gehbewegungen zu erzeugen und ganzkörperliche Bewegungen auszuführen. Höhere Software kann Wahrnehmung (kamera-basiert) und Interaktionsfunktionen hinzufügen, abhängig von der Konfiguration und dem Rechen-Stack.
Warum ist der Unitree R1 Basic wichtig?
Er ist hauptsächlich bemerkenswert für die Senkung der Einstiegskosten in die Experimente mit humanoider Robotik, was es mehr Teams ermöglicht, die Kontrolle der Fortbewegung, verkörperte KI und Mensch-Roboter-Interaktion zu testen, ohne auf viel teurere humanoide Plattformen angewiesen zu sein.
Was sind die Vorteile des Unitree R1 Basic?
Zu den wichtigsten Vorteilen gehören Erschwinglichkeit, ein humanoider Formfaktor für Forschungs- und Interaktionsarbeiten und eine leichte Plattform geeignete Plattform für iterative Entwicklung und Experimente zur Bewegungssteuerung.
Zusammenfassung
Der Der Unitree R1 Basic Humanoid-Roboter wird häufig als zugängliche, entwicklerorientierte humanoide Plattform diskutiert, die niedrige Kosten und und bewegungszentrierte Experimente priorisiert. Mit öffentlich berichteten Hauptspezifikationen (ca. 25 kg und 26 Gelenken) und Preisen nahe 39.999 Yuanspiegelt der R1 Basic den breiteren Trend wider, humanoide Robotik und verkörperte KI für Forschungslabore, Universitäten und Startups zugänglicher zu machen – während dennoch eine sorgfältige Bewertung der Konfigurationsdetails, Softwareunterstützung und Verfügbarkeit nach Region erforderlich ist.
Höhe, Breite und Dicke (stehend): 1210x357x190mm
Gewicht mit Batterie: Ungefähr 25kg
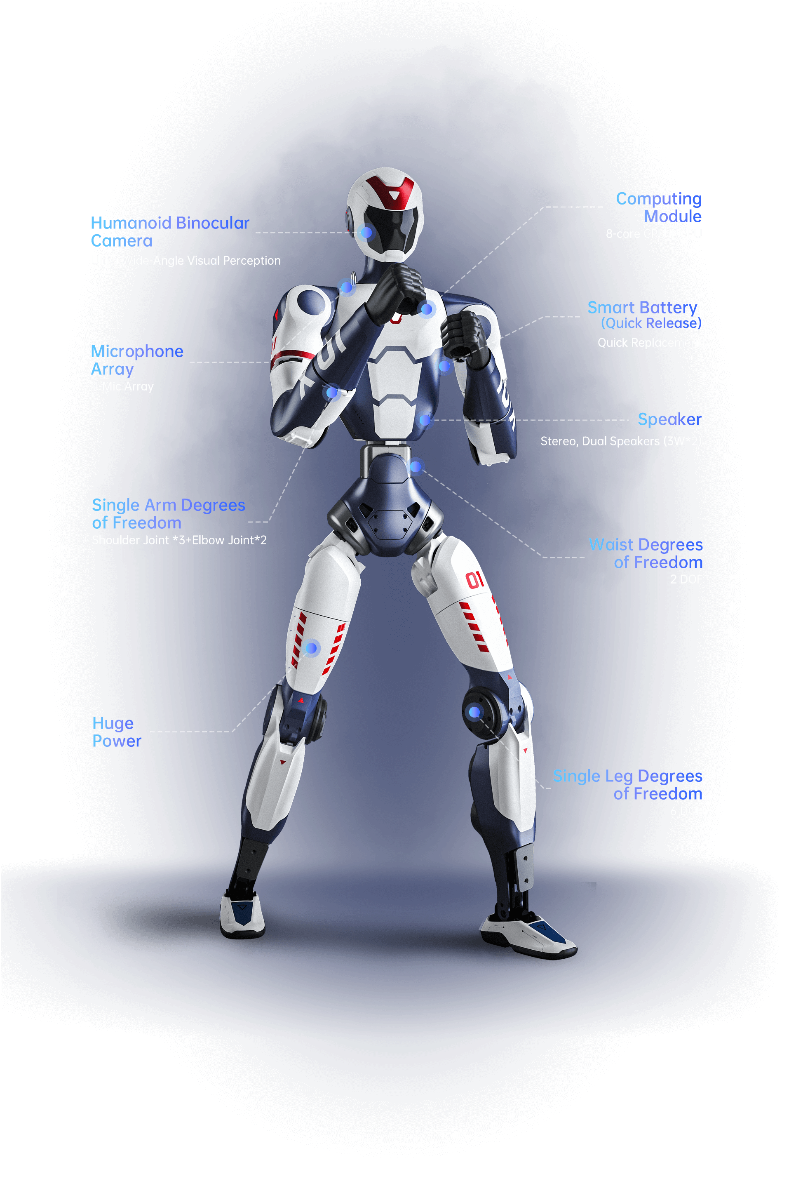
Freiheitsgrade (Gesamtgelenke): 24
Freiheitsgrade pro Bein: 6
Freiheitsgrade für die Taille: 2
Freiheitsgrade pro Arm: 5
Freiheitsgrade pro Kopf: Keine
Maximale Traglast pro Arm: 2kg
Waden- + Oberschenkellänge: 0,675m
Einzelarm Länge: ungefähr 0,435m
Extremes Gelenkbewegungsbereich:
Taille: Y ±150°, R ±30°
Knie: -10° bis +148°
Hüfte: Y ±157°, P -168° bis +146°, R -60° bis +100°
Hohlgelenke mit interner Kabelverlegung: Ja
Gelenkencoder: Dual + Einfach
Kühlsystem: Lokalisierte Luftkühlung
Stromversorgung: Lithiumbatterie
Basis-Rechenleistung: 8-Kern Hochleistungs-CPU
Lautsprecher- und Mikrofonarray Standard
Wi-Fi 6, Bluetooth 5.2: Ja
Wahrnehmungssensor: Humanoide Binokular-Kamera
Ladegerät (1), Smart-Batterie (Schnellverschluss) (1)
Handheld-Fernbedienung (1)
Akkulaufzeit: Ungefähr 1 Stunde
Smart OTA-Upgrade: Unterstützt
Sekundärentwicklung: Nein
Garantie: 8 Monate
Roboterzubehör:
1. Fernbedienung
2. Batterieladegerät
3. Robotertransportkoffer
Schutzhalterung nicht standardmäßig enthalten