Unitree R1 Basic Humanoid Robot (R1 Basic)
")
In stock
- MÁRKA:
- UNITREE ROBOTICS
- MODELL:
- R1 BASIC
- ORIGIN:
- Kína
- Warranty:
- 8 MONTHS
- AVAILABILITY:
- PRE-ORDER
- SKU:
- Unitree-Robotics-R1-Basic
A háztartási munkákra vagy raktári munkákra optimalizált szolgáltató humanoidoktól eltérően az R1 Basic-et elsősorban mint egy fejlesztőorientált platform: egy kicsi, viszonylag könnyű kétlábú, amelyet laboratóriumok, startupok és oktatási környezetek számára terveztek, akik humanoid formát keresnek a járásgenerálás, egyensúly-ellenőrzés, teljes testmozgás-tervezés és ember-robot interakció teszteléséhez. Bejelentett specifikációk—mint például a körüli tömeg 25 kg és 26 ízület—helyezze egy olyan humanoid osztályba, amely az agilitást és a megfizethetőséget helyezi előtérbe a nehéz teherbírás helyett.
Tervezés és Jellemzők
Humanoid form factor and mobility
Az R1 Basic egy klasszikus követ. bipedális humanoid elrendezés (torso, két láb és felsőtest struktúra), hangsúlyozva a dinamikus mozgásokat. A korai médiaképviselet kiemelte a bemutató szekvenciákat, amelyek sportos mozdulatokat tartalmaztak (pl. kartwheel-szerű mozdulatok és ütő gesztusok), amelyek tipikus bemutatói a modern humanoidoknak, mivel stressztesztelik az egyensúlyt, a koordinációt és az aktorok reakcióképességét.
Könnyűsúlyú építési filozófia
A nyilvános leírásokban az R1-t úgy keretezik, mint egy könnyűsúlyú platform összehasonlítva sok teljes méretű humanoiddal, amelyek ipari terhek szállítására törekednek. Egy könnyebb robot általában csökkenti az aktorok nyomatékigényét, egyszerűsítheti a leesés kezelését, és csökkentheti a teljes rendszer költségét - a teheremelési erő és a terhelés alatti állóképesség rovására.
Fejlesztőorientált programozhatóság
A R1 lefedettsége gyakran így írja le: programozható és a fejlesztők számára készült—ami azt jelenti, hogy a platform célja a testreszabott viselkedések, mozgásminták és kutatási munkafolyamatok támogatása (például megerősítéses tanulási politikák a mozgás vagy a percepció-vezérelt navigáció számára).
Megjegyzés: A konkrét szoftverstack, SDK részletei és a támogatott middleware (pl. ROS/ROS 2) termékgenerációnként és konfigurációnként változhat; a potenciális vásárlók általában ezeket az elemeket hivatalos dokumentációban vagy árajánlatokban erősítik meg.
Technológia és műszaki adatok
Mechanikai szerkezet és szabadsági fokok
A nyilvános jelentések az R1 Basic-ot említették a kb. 25 kg a 26 ízület, javasolva egy többízületes architektúrát, amely támogatja a teljes testmozgást és az kifejező mozgást, nem csupán a minimális kétlábú járást.
Az humanoid robotok esetében a „ízületek” általában az aktív szabadságfokokat jelentik a csípők, térdek, bokák, törzs/derék, vállak, könyökök, és néha csuklók vagy kézmechanizmusok körül, a változattól függően.
Aktiválás és mozgásvezérlés (általános jellemzők)
Míg a részletes aktuátor specifikációk nem következetesen jelennek meg ugyanazon a helyen a különböző forrásokban, az ebbe a kategóriába tartozó humanoidok jellemzően támaszkodnak elektromos hajtóművek integrált érzékeléssel (pozíció/sebesség/nyomaték becslés) és zárt hurkú vezérléssel a egyensúly fenntartására. A fő vezérlési rétegek általában a következőket tartalmazzák:
-
Állapotbecslés (IMU + közös érzékelés) a test orientációjának és stabilitásának következtetésére
-
Teljes test irányítás a lábak és a felsőtest koordinálása korlátok között
-
Gait generation a gyaloglás, a fordulás és a helyreállítási manőverekhez
-
Esés és helyreállítási viselkedések a kár minimalizálása és a testtartás visszaállítása
Percepció és interakció
Néhány jelentés az R1-et a következőkkel tulajdonítja hang- és képfelismerés képességek (gyakran „AI funkciók” néven emlegetve).
A gyakorlatban ezek a képességek a fedélzeti érzékeléstől a kötött vagy perem számítási munkafolyamatokig terjedhetnek, attól függően, hogy milyen számítási modul és kamera/érzékelő csomag tartozik a vásárláshoz.
A Unitree humanoid portfóliójában való elhelyezkedés
Unitree szélesebb körű humanoidok iránti törekvése (más modellek mellett, amelyeket kutatási és ipari próbákra forgalmaznak) gyakran kerül szóba a cég növekedésének és a humanoid robotika szektorának bővülésének összefüggésében Kínában.
Ez a kontextus fontos, mert befolyásolja a hosszú távú támogatást: a firmware frissítések, a pótalkatrészek elérhetősége és a folyamatos ökoszisztéma fejlesztés gyakran a gyártó stratégiai prioritásaihoz kapcsolódik.
Alkalmazások és Használati Esetek
Robotics research and embodied AI
A R1 Basic legtermészetesebb illeszkedése kutatás és prototípus-készítés, beleértve:
-
A megerősítéses tanulás a kétlábú mozgásért (training policies in simulation and transferring to hardware)
-
Teljes test mozgás tervezés a kiegyensúlyozás, lépés és zavar elhárítása érdekében
-
Imitációs tanulás a gesztusok és mozgásminták számára
-
Megtestesült MI kísérletek, ahol a percepció informálja a mozgási döntéseket
Oktatás és laboratóriumi oktatás
Az egyetemek és a technikai programok kisebb humanoidokat használhatnak a tanításhoz:
-
A vezérléselmélet (PID/állapot-tér vezérlés) alkalmazása instabil rendszerekre
-
Robot kinematika és dinamika (többlinkes modellezés)
-
Szenzor fúzió és valós idejű rendszerek
-
Biztonsági mérnöki és üzemeltetési eljárások mobil robotok számára
Demonstrációk, marketing és interakciós prototípusok
A humanoidokat gyakran kontrollált környezetekben alkalmazzák bemutatókhoz, eseményekhez és korai szakaszú ember-robot interakciós prototípusokhoz—különösen, amikor a cél az értékelés. nyilvános elfogadás, interakciós minták, vagy beszéd/ látás interfészek inkább a nehéz munkaterhelés helyett.
Előnyök / Haszon
Alacsonyabb költségű belépés a humanoid fejlesztésbe
A R1 Basic-hez kapcsolódó meghatározó előny a ár hozzáférhetőség a sok humanoidhoz képest, amelyeket tízezrek és százezrek dollárra becsülnek.
Egy alacsonyabb árkategória bővítheti a kisebb csapatok körében a használatot, és lehetővé teheti a többrobot-flották kutatási célú alkalmazását anélkül, hogy egyetlen drága platform szűk keresztmetszetté válna.
Könnyű platform a biztonságos iterációhoz
Egy könnyebb robot csökkentheti a kinetikus energiát esések során, és egyszerűsítheti a kezelést, szállítást és laboratóriumi műveleteket - ami fontos a gyorsan mozgásviselkedéseken iteráló csapatok számára.
Mozgásközpontú kísérletezéshez alkalmas
Mivel a korai narratívák a dinamikus bemutatókra összpontosítanak, az R1 Basic gyakran platformként kerül megvitatásra sports-szerű mozdulatok, járásmunka és egész testet érintő irányítási kísérletek - olyan területek, ahol a humanoidok egyedülállóan értékesek lehetnek a kerekes robotokkal összehasonlítva.
Gyakran Ismételt Kérdések Szekció
Mi az Unitree R1 Basic Humanoid Robot?
A Unitree R1 Alapmodell is egy programozható humanoid robot positioned as a lower-cost platform for developers, labs, and education, reported at around 25 kg a 26 ízület és egy cím ár alatt US$6,000 2025-ös lefedettség.
Hogyan működik az Unitree R1 Basic?
Mint a legtöbb humanoid, ez kombinálja elektromos hajtóművek, közös érzékelők és egy IMU valós idejű vezérlő szoftverrel az egyensúly fenntartására, járási mozgások generálására és teljes testmozgások végrehajtására. A magasabb szintű szoftver érzékelési (kamera alapú) és interakciós funkciókat adhat hozzá a konfigurációtól és a számítási stacktől függően.
Miért fontos a Unitree R1 Basic?
Kiemelkedő főként a következők miatt a belépési költség csökkentése a humanoid robotika kísérletezésbe, lehetővé téve több csapat számára, hogy tesztelje a mozgásirányítást, a megtestesült mesterséges intelligenciát és az ember-robot interakciót anélkül, hogy sokkal drágább humanoid platformokra támaszkodnának.
Mik a Unitree R1 Basic előnyei?
A kulcsfontosságú előnyök közé tartozik megfizethetőség, a humanoid form factor a kutatási és interakciós munkához, és egy könnyűsúlyú platform alkalmas iteratív fejlesztésre és mozgásvezérlési kísérletezésre.
Összefoglaló
A Unitree R1 Alap Humanoid Robot széles körben vitatott, mint egy hozzáférhető, fejlesztőközpontú humanoid platform, amely prioritásként kezeli alacsony költség és mozgásközpontú kísérletezés. A nyilvánosan közzétett főbb specifikációkkal (körülbelül 25 kg és 26 ízület) és árak közelében 39,999 jüan, az R1 Basic tükrözi a szélesebb trendet, hogy a humanoid robotika és megtestesült MI több kutatólabor, egyetem és startup számára elérhetőbbé válik—miközben továbbra is gondos értékelést igényel a konfigurációs részletek, a szoftver támogatás és a régiónkénti elérhetőség tekintetében.
Magasság, Szélesség és Vastagság (állvány): 1210x357x190mm
A súly akkumulátorral: Körülbelül 25kg
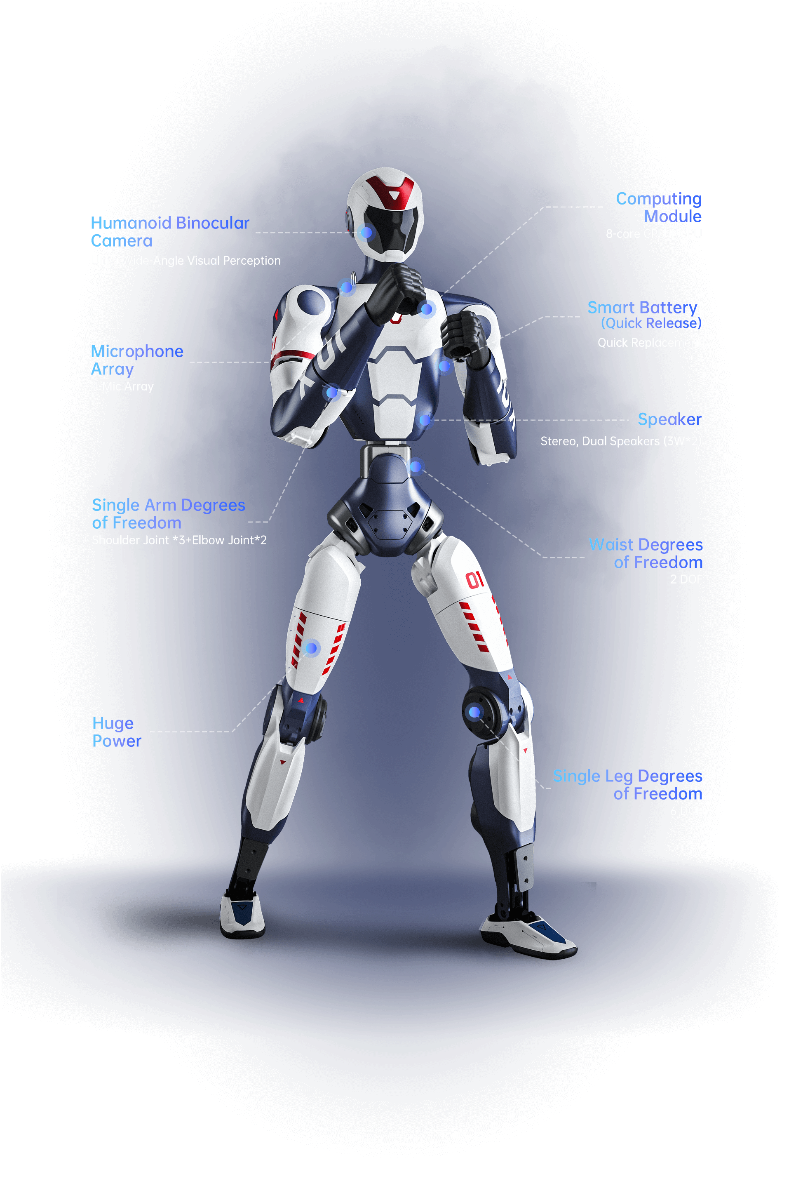
Szabadságfok (Összes Ízület): 24
Lábankénti szabadságfokok: 6
A derék szabadsági fokai: 2
Szabadsági fokok karonként: 5
Fej/headenkénti szabadságfok: Nincs
Maximum single arm payload: 2kg
Calf + Thigh Length: 0.675m
egyetlen kar hossza: körülbelül 0,435m
Extrém Ízületi Mozgástartomány:
Derék: Y ±150°, R ±30°
Térd: -10° és +148° között
Hip: Y ±157°, P -168° to +146°, R -60° to +100°
Hollow Joints with Internal Cable Routing: Igen
Közös Kódolók: Dupla + Egyszeres
Hűtőrendszer: Helyi Levegő Hűtés
Power Supply: Lítium Akkumulátor
Alapvető Számítási Teljesítmény: 8-magos Magas Teljesítményű CPU
Hangszóró és Mikrofon Tömb Szabvány
Wi-Fi 6, Bluetooth 5.2: Igen
Perception Sensor: Humanoid Binocular Camera
Töltő (1), Okos Akkumulátor (Gyors Kioldás) (1)
Kézi Távvezérlő (1)
Akkumulátor élettartama: Körülbelül 1 óra
Okos OTA Frissítés: Támogatott
Másodlagos Fejlesztés: Nem
Jótállás: 8 hónap
Robot Kiegészítők:
1. Távvezérlő
2. Akkumulátor Töltő
3. Robot Szállító Tok
Védő konzol alapértelmezés szerint nem tartozik hozzá