Unitree R1 Basic Humanoid Robot (R1 Basic)
")
In stock
- MARKA:
- UNITREE ROBOTICS
- MODEL:
- R1 BASIC
- ORIGIN:
- Chiny
- Warranty:
- 8 MONTHS
- AVAILABILITY:
- USUALLY SHIPS IN 7-14 BUSINESS DAYS
- SKU:
- Unitree-Robotics-R1-Basic
W przeciwieństwie do humanoidów serwisowych zoptymalizowanych do prac domowych lub magazynowych, R1 Basic został przede wszystkim scharakteryzowany jako platforma skierowana do deweloperów: mały, stosunkowo lekki robot dwunożny przeznaczony do laboratoriów, startupów i środowisk edukacyjnych, które chcą humanoidalnej formy do testowania generacji chodu, kontroli równowagi, planowania ruchu całego ciała i interakcji człowiek-robot. Podane specyfikacje — takie jak masa około 25 kg i 26 stawów— umieszczają go w klasie humanoidów, które priorytetowo traktują zwinność i przystępność cenową kosztem dużej nośności.
Projekt i cechy
Humanoidalna forma i mobilność
R1 Basic podąża za klasycznym układem humanoidalnym dwunożnym (tułów, dwie nogi i struktura górnej części ciała), kładąc nacisk na dynamiczne ruchy. Wczesne relacje medialne podkreślały sekwencje demonstracyjne z udziałem ruchów sportowych (np. ruchy podobne do przewrotów i gesty), które są typowymi pokazami nowoczesnych humanoidów, ponieważ testują równowagę, koordynację i reakcję aktuatorów.
Filozofia lekkiej konstrukcji
W publicznych opisach R1 przedstawiany jest jako lekka platforma w porównaniu z wieloma humanoidami pełnowymiarowymi, które dążą do przemysłowych nośności. Lżejszy robot generalnie zmniejsza wymagania dotyczące momentu obrotowego aktuatorów, może uprościć zarządzanie upadkami i obniżyć całkowity koszt systemu — kosztem siły podnoszenia i wytrzymałości pod obciążeniem.
Programowalność skierowana do deweloperów
Relacje dotyczące R1 często opisują go jako programowalny i skierowany do deweloperów — co oznacza, że platforma ma wspierać niestandardowe zachowania, sekwencje ruchów i przepływy pracy badawcze (na przykład polityki uczenia przez wzmocnienie dla lokomocji lub nawigacji opartej na percepcji).
Uwaga: Konkretna stosowana stos technologiczny, szczegóły SDK i wspierane oprogramowanie pośredniczące (np. ROS/ROS 2) mogą się różnić w zależności od generacji produktu i konfiguracji; potencjalni nabywcy zazwyczaj potwierdzają te elementy w oficjalnej dokumentacji lub ofertach.
Technologia i specyfikacje
Struktura mechaniczna i stopnie swobody
Publiczne raporty podawały, że R1 Basic waży około 25 kg z 26 stawów, co sugeruje architekturę wielostawową, która może wspierać ruch całego ciała i ekspresyjne ruchy, a nie tylko minimalne chodzenie dwunożne.
W robotach humanoidalnych „stawy” zazwyczaj odnoszą się do aktuowanych stopni swobody w biodrach, kolanach, kostkach, tułowiu/talii, ramionach, łokciach, a czasami nadgarstkach lub mechanizmach rąk w zależności od wariantu.
Aktuacja i kontrola ruchu (ogólne cechy)
Chociaż szczegółowe specyfikacje aktuatorów nie są konsekwentnie publikowane w tym samym miejscu w różnych źródłach, humanoidy w tej klasie zazwyczaj polegają na elektrycznych aktuatorach z wbudowanym czujnikiem (szacowanie pozycji/prędkości/momentu) i kontrolą w pętli zamkniętej w celu utrzymania równowagi. Podstawowe warstwy kontrolne zazwyczaj obejmują:
-
Szacowanie stanu (IMU + czujniki stawów) w celu wnioskowania o orientacji ciała i stabilności
-
Kontrola całego ciała w celu koordynacji nóg i górnej części ciała w warunkach ograniczeń
-
Generacja chodu do chodzenia, skręcania i manewrów odzyskiwania
-
Wykrywanie upadków i zachowania odzyskiwania w celu ograniczenia uszkodzeń i resetowania postawy
Percepcja i interakcja
Niektóre raporty przypisują R1 zdolności rozpoznawania głosu i obrazu (często omawiane ogólnie jako „cechy AI”).
W praktyce te zdolności mogą obejmować od pokładowej percepcji po połączenia przewodowe lub obliczenia brzegowe, w zależności od modułu obliczeniowego i pakietu kamery/czujnika dołączonego do danego zakupu.
Pozycjonowanie w portfolio humanoidów Unitree
Szerokie dążenie Unitree do humanoidów (obok innych modeli reklamowanych do badań i prób przemysłowych) jest często omawiane w kontekście wzrostu firmy i rozwijającego się sektora robotyki humanoidalnej w Chinach.
Ten kontekst ma znaczenie, ponieważ wpływa na długoterminowe wsparcie: aktualizacje oprogramowania, dostępność części zamiennych i dalszy rozwój ekosystemu są często związane z priorytetami strategicznymi producenta.
Zastosowania i przypadki użycia
Badania w robotyce i AI wcielonej
Najbardziej naturalnym zastosowaniem R1 Basic jest badania i prototypowanie, w tym:
-
Uczenie przez wzmocnienie dla lokomocji dwunożnej (szkolenie polityk w symulacji i przenoszenie na sprzęt)
-
Planowanie ruchu całego ciała dla równowagi, kroków i odrzucania zakłóceń
-
Uczenie przez naśladowanie dla gestów i sekwencji ruchów
-
Eksperymenty z AI wcieloną , gdzie percepcja informuje decyzje ruchowe
Edukacja i instrukcje laboratoryjne
Uniwersytety i programy techniczne mogą używać mniejszych humanoidów do nauczania:
-
Teoria sterowania (PID/kontrola w przestrzeni stanów) stosowana w niestabilnych systemach
-
Kinematyka i dynamika robotów (modelowanie wielolinkowe)
-
Fuzja czujników i systemy czasu rzeczywistego
-
Inżynieria bezpieczeństwa i procedury operacyjne dla robotów mobilnych
Demonstracje, marketing i prototypy interakcji
Humanoidy są często wykorzystywane w kontrolowanych środowiskach do demonstracji, wydarzeń i prototypów interakcji człowiek-robot na wczesnym etapie — szczególnie gdy celem jest ocena akceptacji publicznej, wzorców interakcjilub interfejsów mowy/wizji zamiast dużej wydajności pracy.
Zalety / Korzyści
Niższy koszt wejścia w rozwój humanoidów
Definiującą korzyścią związaną z R1 Basic jest dostępność cenowa w porównaniu z wieloma humanoidami, które są raportowane w dziesiątkach tysięcy do setek tysięcy dolarów.
Niższa cena może zwiększyć adopcję wśród mniejszych zespołów i umożliwić floty robotów do badań bez jednego drogiego sprzętu, który stałby się wąskim gardłem.
Lekka platforma dla bezpieczniejszej iteracji
Lżejszy robot może zmniejszyć energię kinetyczną podczas upadków i może uprościć obsługę, transport i operacje laboratoryjne — co jest ważne dla zespołów szybko iterujących nad zachowaniami ruchowymi.
Odpowiedni do eksperymentów skoncentrowanych na ruchu
Ponieważ wczesne narracje koncentrują się na dynamicznych demonstracjach, R1 Basic jest powszechnie omawiany jako platforma do ruchów sportowych, pracy nad chodem i eksperymentów z kontrolą całego ciała — obszarów, w których humanoidy mogą być wyjątkowo cenne w porównaniu z robotami na kołach.
Sekcja FAQ
Czym jest robot humanoidalny Unitree R1 Basic?
Unitree R1 Basic to programowalny robot humanoidalny pozycjonowany jako tańsza platforma dla deweloperów, laboratoriów i edukacji, raportowany w okolicach 25 kg z 26 stawów i z ceną wyjściową poniżej 6 000 USD w relacjach z 2025 roku.
Jak działa Unitree R1 Basic?
Jak większość humanoidów, łączy elektrycznych aktuatorach, czujniki stawów i IMU z oprogramowaniem do kontroli w czasie rzeczywistym, aby utrzymać równowagę, generować ruchy chodzenia i wykonywać ruchy całego ciała. Oprogramowanie wyższego poziomu może dodać percepcję (opartą na kamerze) i funkcje interakcji w zależności od konfiguracji i stosu obliczeniowego.
Dlaczego Unitree R1 Basic jest ważny?
Jest szczególnie istotny ze względu na obniżenie kosztów wejścia w eksperymenty z robotyką humanoidalną, umożliwiając większej liczbie zespołów testowanie kontroli lokomocji, AI wcielonej i interakcji człowiek-robot bez polegania na znacznie droższych platformach humanoidalnych.
Jakie są korzyści z Unitree R1 Basic?
Kluczowe korzyści obejmują przystępność cenową, humanoidalną formę do pracy badawczej i interakcji oraz lekka platforma odpowiedniość do iteracyjnego rozwoju i eksperymentów z kontrolą ruchu.
Podsumowanie
Robot humanoidalny Unitree R1 Basic jest szeroko omawiany jako dostępna, skoncentrowana na deweloperach platforma humanoidalna, która priorytetowo traktuje niskie koszty i eksperymentów skoncentrowanych na ruchu. Z publicznie raportowanymi specyfikacjami (około 25 kg i 26 stawów) i ceną bliską 39 999 juanów, R1 Basic odzwierciedla szerszy trend w kierunku uczynienia robotyki humanoidalnej i AI wcielonej bardziej dostępnymi dla laboratoriów badawczych, uniwersytetów i startupów — jednocześnie wymagając starannej oceny szczegółów konfiguracji, wsparcia oprogramowania i dostępności w regionie.
Wysokość, szerokość i grubość (stojąc): 1210x357x190mm
Waga z baterią: około 25kg
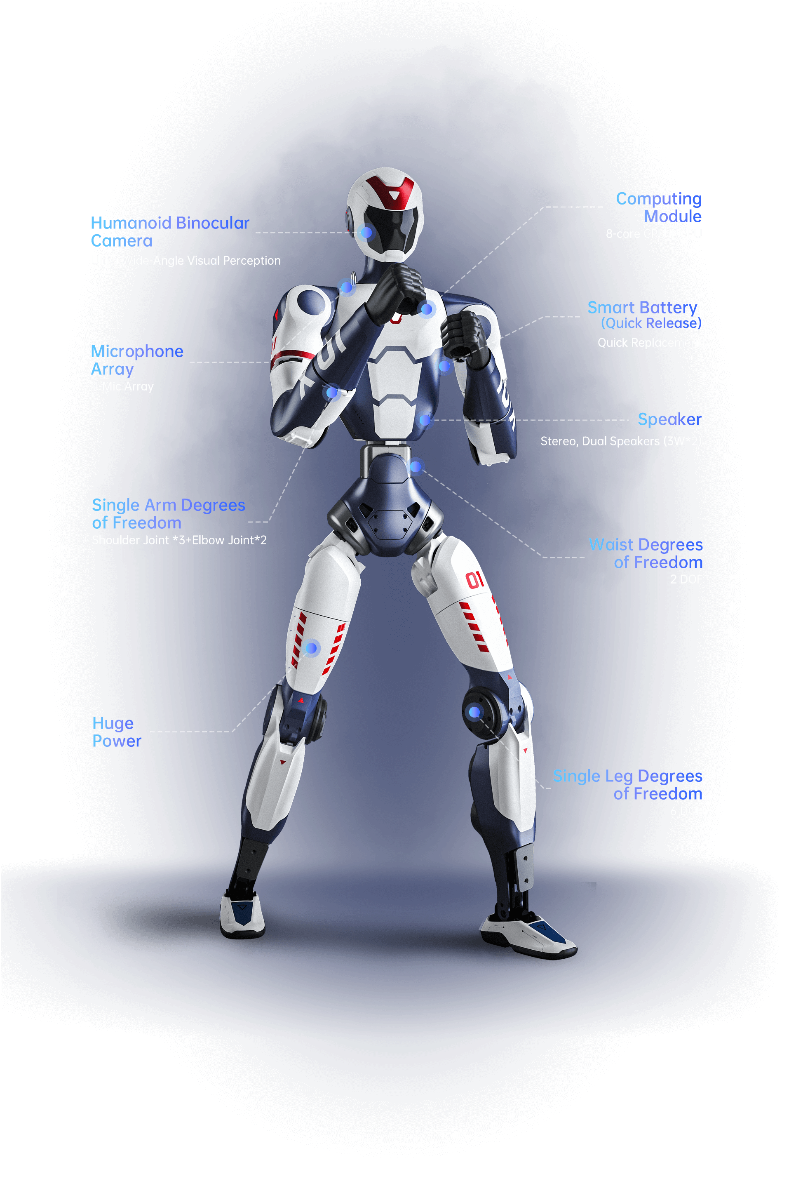
Stopień swobody (łącznie stawy): 24
Stopnie swobody na nogę: 6
Stopnie swobody dla talii: 2
Stopnie swobody na ramię: 5
Stopnie swobody na głowę: Brak
Maksymalne obciążenie jednego ramienia: 2kg
Długość łydki + uda: 0,675m
długość jednego ramienia: około 0,435m
Ekstremalny zakres ruchu stawów:
Talia: Y ±150°, R ±30°
Kolano: -10° do +148°
Biodro: Y ±157°, P -168° do +146°, R -60° do +100°
Puste stawy z wewnętrznym prowadzeniem kabli: Tak
Enkodery stawów: Podwójne + pojedyncze
System chłodzenia: Lokalizowane chłodzenie powietrzem
Zasilanie: Bateria litowa
Podstawowa moc obliczeniowa: 8-rdzeniowy procesor wysokowydajny
Głośnik i mikrofon w standardzie
Wi-Fi 6, Bluetooth 5.2: Tak
Czujnik percepcyjny: Humanoidalna kamera binokularna
Ładowarka (1), inteligentna bateria (szybkie zwolnienie) (1)
Pilot zdalnego sterowania (1)
Czas pracy baterii: około 1 godzina
Inteligentna aktualizacja OTA: Wsparcie
Rozwój wtórny: Nie
Gwarancja: 8 miesięcy
Akcesoria robota:
1. Pilot zdalnego sterowania
2. Ładowarka do baterii
3. Walizka transportowa robota
Ochronna ramka nie jest domyślnie dołączona